8月20至8月27日,应永利yl23411集团官网李乐教师邀请,荷兰代尔夫特理工大学系统与控制研究中心助理教授Dr. Simone Baldi于线上开展自适应控制及应用课程。本课介绍了自适应控制系统分析和设计的基本理论和方法,包括前期知识,模型参考自适应控制、鲁棒自适应控制、自适应切换控制等;并结合实例介绍自适应控制在无人机路径跟踪、无人车编队保持等无人系统控制问题中的应用。
Dr. Simone Baldi,2005年,2007年和2011年分别在意大利佛罗伦萨大学获得电气工程学士,自动化系统控制工程硕士和系统与信息学博士学位,希腊CERTH和塞浦路斯大学博士后,师从Edoardo Mosca教授(IEEE Life Fellow, IFAC Fellow)、Petros Ioannou教授(IEEE Life Fellow, IFAC Fellow,IEEE-ITS前主编)和Markos Papageorgiou教授(IEEE Fellow, IFAC Fellow, Transp. Reas. C前主编)。主要研究方向为自适应与学习系统及其在智能交通,智能能源,智能电网,无人驾驶,无人机编队等领域的应用,至今已发表论文100余篇,SCI收录论文70余篇,EI收录论文50余篇,其中在自动控制领域顶刊IEEE TAC,Automatica,以及交通领域,智能能源领域,航空航天等应用领域顶刊上发表长文30余篇,至今为止已培养员工30余名。同时也担任意大利国家天体物理研究所顾问,瑞士国家自然基金评审专家等。
Simone Baldi教授首先介绍了系统的基本概念,为低年级的本科同学奠定控制的基础,然后介绍了控制的基本分类、不同的表述方式以及自适应控制与经典控制方法的不同和优越之处,并给出简单的求解示例和应用实例来介绍自适应控制的基本方法和重要性。
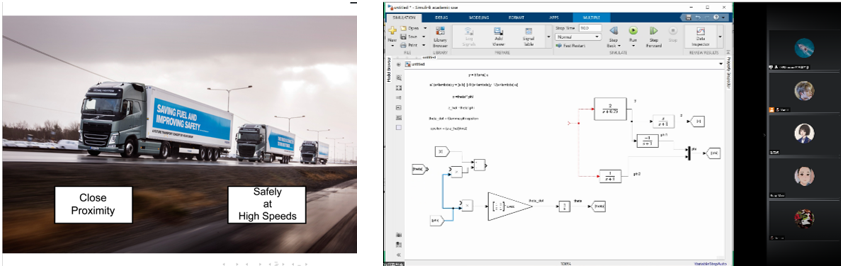
之后的课程从Lypunov定理、建立系统参数模型、不同的参数估计方法、自适应控制率的设计、鲁棒性控制、不同系统的自适应控制策略等方面进行了讲解。为了方便同学们对所学知识有更好的理解和应用,Simone Baldi教授还进行了视频介绍以及simulink仿真演示,最后一节课还介绍了自适应控制的新应用,让同学们对自适应控制有了更多的认识。
8天课程教学虽然短暂,但同学们对自适应控制的认识却有了很大程度的深入,同时对自适应控制的发展、应用以及前沿研究有了初步的了解,不仅开拓了同学们的视野,同时也能启发员工从多角度全方位的思考问题。



 国际合作
国际合作